




Suunnittelufotoninenintegroitu piiri
Fotoniset integroidut piirit(PIC) suunnitellaan usein matemaattisten komentosarjojen avulla, koska reitin pituus on tärkeä interferometreissä tai muissa sovelluksissa, jotka ovat herkkiä reitin pituudelle.KUVAvalmistetaan kuvioimalla kiekolle useita kerroksia (tyypillisesti 10-30), jotka koostuvat monikulmaisista muodoista, usein esitettynä GDSII-muodossa. Ennen tiedoston lähettämistä fotomaskin valmistajalle on erittäin toivottavaa pystyä simuloimaan PIC:tä suunnittelun oikeellisuuden varmistamiseksi. Simulaatio on jaettu useisiin tasoihin: alin taso on kolmiulotteinen sähkömagneettinen (EM) simulointi, jossa simulointi suoritetaan aallonpituuden tasolla, vaikka materiaalin atomien välisiä vuorovaikutuksia käsitellään makroskooppisessa mittakaavassa. Tyypillisiä menetelmiä ovat kolmiulotteinen äärellisdifferentiaaliaikataso (3D FDTD) ja ominaismuotolaajennus (EME). Nämä menetelmät ovat tarkimpia, mutta epäkäytännöllisiä koko PIC-simulaation ajan. Seuraava taso on 2,5-ulotteinen EM-simulointi, kuten äärellisdifferentiaalisäteen eteneminen (FD-BPM). Nämä menetelmät ovat paljon nopeampia, mutta uhraavat jonkin verran tarkkuutta ja voivat käsitellä vain paraksiaalista etenemistä, eikä niitä voida käyttää esimerkiksi resonaattoreiden simulointiin. Seuraava taso on 2D EM -simulointi, kuten 2D FDTD ja 2D BPM. Nämäkin ovat nopeampia, mutta niillä on rajoitettu toiminnallisuus, kuten polarisaatiorotaattoreiden simulointi. Lisätaso on läpäisy- ja/tai sirontamatriisimulointi. Jokainen pääkomponentti pelkistetään komponentiksi, jolla on tulo ja lähtö, ja kytketty aaltojohdin pelkistetään vaihesiirto- ja vaimennuselementiksi. Nämä simulaatiot ovat erittäin nopeita. Lähtösignaali saadaan kertomalla läpäisymatriisi tulosignaalilla. Sirontamatriisi (jonka elementtejä kutsutaan S-parametreiksi) kertoo tulo- ja lähtösignaalit komponentin toisella puolella löytääkseen tulo- ja lähtösignaalit komponentin toisella puolella. Pohjimmiltaan sirontamatriisi sisältää elementin sisäisen heijastuksen. Sirontamatriisi on yleensä kaksi kertaa suurempi kuin läpäisymatriisi kussakin ulottuvuudessa. Yhteenvetona voidaan todeta, että 3D EM:stä läpäisy-/sirontamatriisimulointiin jokainen simulaatiokerros tarjoaa kompromissin nopeuden ja tarkkuuden välillä, ja suunnittelijat valitsevat oikean simulaatiotason omiin tarpeisiinsa optimoidakseen suunnittelun validointiprosessin.
Tiettyjen elementtien sähkömagneettiseen simulointiin luottaminen ja koko PIC:n simulointi sironta-/siirtomatriisin avulla ei kuitenkaan takaa täysin oikeaa suunnittelua virtauslevyn edessä. Esimerkiksi väärin lasketut reittipituudet, monimuotoaaltojohteet, jotka eivät tehokkaasti vaimenna korkeamman asteen moodeja, tai kaksi liian lähellä toisiaan olevaa aaltojohtoa, jotka johtavat odottamattomiin kytkentäongelmiin, jäävät todennäköisesti huomaamatta simuloinnin aikana. Siksi, vaikka edistyneet simulointityökalut tarjoavat tehokkaita suunnittelun validointiominaisuuksia, se vaatii silti suunnittelijalta suurta valppautta ja huolellista tarkastusta yhdistettynä käytännön kokemukseen ja tekniseen tietämykseen suunnittelun tarkkuuden ja luotettavuuden varmistamiseksi ja virtauskaavion riskin vähentämiseksi.
Harva FDTD -niminen tekniikka mahdollistaa 3D- ja 2D-FDTD-simulaatioiden suorittamisen suoraan täydelliselle PIC-suunnittelulle suunnittelun validoimiseksi. Vaikka minkään sähkömagneettisen simulointityökalun on vaikea simuloida erittäin suuren mittakaavan PIC-piiriä, harva FDTD pystyy simuloimaan melko suuren paikallisen alueen. Perinteisessä 3D-FDTD:ssä simulointi alkaa alustamalla sähkömagneettisen kentän kuusi komponenttia tietyssä kvantisoidussa tilavuudessa. Ajan edetessä tilavuuden uusi kenttäkomponentti lasketaan ja niin edelleen. Jokainen vaihe vaatii paljon laskentaa, joten se vie kauan. Harvassa 3D-FDTD:ssä sen sijaan, että laskettaisiin jokaisessa vaiheessa tilavuuden jokaisessa pisteessä, ylläpidetään luetteloa kenttäkomponenteista, jotka voivat teoriassa vastata mielivaltaisen suurta tilavuutta ja jotka voidaan laskea vain näille komponenteille. Jokaisella aika-askeleella lisätään kenttäkomponenttien vieressä olevat pisteet, kun taas tietyn tehokynnyksen alapuolella olevat kenttäkomponentit poistetaan. Joillakin rakenteilla tämä laskenta voi olla useita kertaluokkia nopeampi kuin perinteisessä 3D-FDTD:ssä. Harvat FDTDS-simulaatiot eivät kuitenkaan toimi hyvin dispersiivisten rakenteiden käsittelyssä, koska tämä aikakenttä leviää liikaa, mikä johtaa liian pitkiin ja vaikeasti hallittaviin listoihin. Kuva 1 näyttää esimerkkikuvan 3D-FDTD-simulaatiosta, joka on samanlainen kuin polarisaatiosäteenjakaja (PBS).
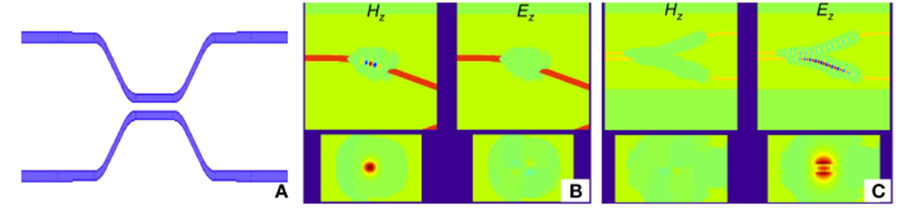
Kuva 1: Simulaatiotulokset 3D-harvasta FDTD:stä. (A) on simuloitavan rakenteen, joka on suuntakytkin, yläkuva. (B) Näyttää kuvakaappauksen simulaatiosta, jossa käytetään kvasi-TE-viritystä. Yllä olevat kaksi kaaviota näyttävät kvasi-TE- ja kvasi-TM-signaalit yläkuvana, ja alla olevat kaksi kaaviota näyttävät vastaavan poikkileikkauskuvan. (C) Näyttää kuvakaappauksen simulaatiosta, jossa käytetään kvasi-TM-viritystä.
Julkaisun aika: 23.7.2024