




Oppialaserkohdistustekniikat
Lasersäteen kohdistuksen varmistaminen on kohdistusprosessin ensisijainen tehtävä. Tämä voi vaatia lisäoptiikan, kuten linssien tai kuitukollimaattoreiden, käyttöä, erityisesti diodien taikuitulaserlähteetEnnen laserin kohdistusta sinun on tunnettava laserin turvallisuusmenettelyt ja varmistettava, että sinulla on käytössäsi laserin aallonpituuksia estävät suojalasit. Lisäksi näkymättömien lasereiden kohdalla saatetaan tarvita tunnistuskortteja kohdistuksen helpottamiseksi.
SisäänlaserkohdistusSäteen kulmaa ja sijaintia on ohjattava samanaikaisesti. Tämä voi vaatia useiden optiikkojen käyttöä, lisätä kohdistusasetusten monimutkaisuutta ja viedä paljon työpöytätilaa. Kinemaattisten kiinnitysten avulla voidaan kuitenkin ottaa käyttöön yksinkertainen ja tehokas ratkaisu, erityisesti tilarajoitteisiin sovelluksiin.
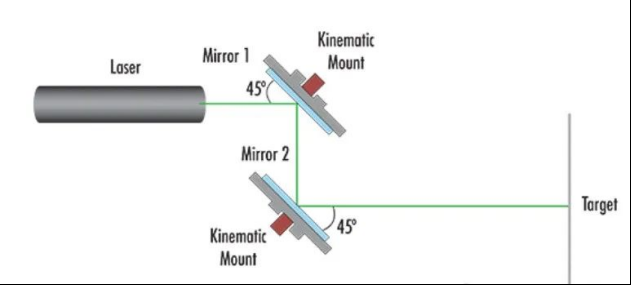
Kuva 1: Yhdensuuntainen (Z-taittoinen) rakenne
Kuva 1 esittää Z-taittorakenteen perusrakenteen ja nimen syyn. Kahdelle kinemaattiselle jalustalle asennettua peiliä käytetään kulmasiirtoon, ja ne on sijoitettu siten, että tuleva valonsäde osuu kummankin peilin pintaan samassa kulmassa. Asetuksen yksinkertaistamiseksi kaksi peiliä asetetaan noin 45° kulmaan. Tässä kokoonpanossa ensimmäistä kinemaattista tukea käytetään säteen halutun pystysuoran ja vaakasuoran asennon saavuttamiseen, kun taas toista tukea käytetään kulman kompensointiin. Z-taittorakenne on edullinen menetelmä useiden lasersäteiden kohdistamiseen samaan kohteeseen. Kun yhdistetään eri aallonpituuksilla varustettuja lasereita, yksi tai useampi peili voi olla tarpeen korvata dikroisilla suodattimilla.
Päällekkäisyyksien minimoimiseksi kohdistusprosessissa laser voidaan kohdistaa kahteen erilliseen vertailupisteeseen. Yksinkertainen tähtäysristikko tai valkoinen X:llä merkitty kortti ovat erittäin hyödyllisiä työkaluja. Aseta ensin ensimmäinen vertailupiste peilin 2 pinnalle tai sen lähelle, mahdollisimman lähelle kohdetta. Toinen vertailupiste on itse kohde. Käytä ensimmäistä kinemaattista jalustaa säteen vaakasuoran (X) ja pystysuoran (Y) sijainnin säätämiseen alkuperäisessä vertailupisteessä siten, että se vastaa kohteen haluttua sijaintia. Kun tämä sijainti on saavutettu, toista kinemaattista kiinnikettä käytetään kulmapoikkeaman säätämiseen ja lasersäde suunnataan todelliseen kohteeseen. Ensimmäistä peiliä käytetään halutun kohdistuksen arvioimiseen, kun taas toista peiliä käytetään toisen vertailupisteen tai kohteen kohdistuksen hienosäätöön.
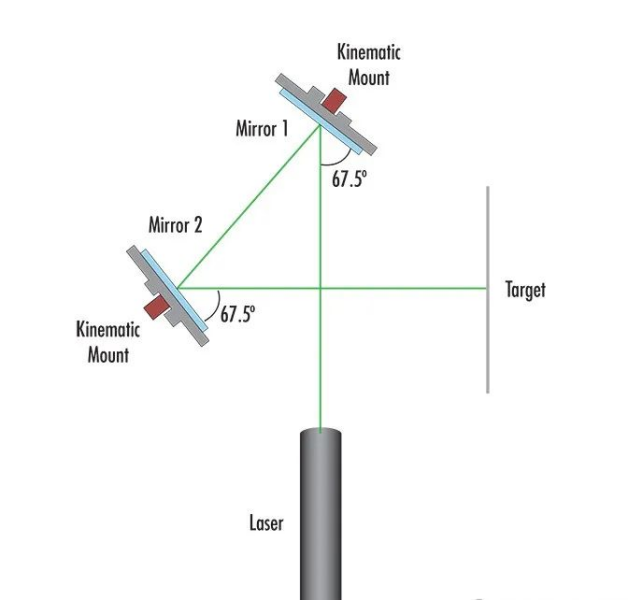
kuva 2: Pystysuuntainen (kuva 4) rakenne
Neliökuvioinen rakenne on monimutkaisempi kuin Z-taitto, mutta se voi tarjota kompaktimman järjestelmäasettelun. Z-taittorakenteen tavoin neliökuvioisessa asettelussa käytetään kahta liikkuviin kiinnikkeisiin asennettua peiliä. Toisin kuin Z-taittorakenteessa, peili on kuitenkin asennettu 67,5 asteen kulmaan, joka muodostaa lasersäteen kanssa "4":n muodon (kuva 2). Tämä järjestely mahdollistaa heijastimen 2 sijoittamisen poispäin lasersäteen lähteen reitistä. Kuten Z-taittokokoonpanossa,lasersädetulee kohdistaa kahteen referenssipisteeseen: ensimmäinen referenssipiste peiliin 2 ja toinen kohteeseen. Ensimmäistä kinemaattista kiinnikettä käytetään laserpisteen siirtämiseen haluttuun XY-asentoon toisen peilin pinnalla. Toista kinemaattista kiinnikettä tulisi sitten käyttää kulmasiirtymän kompensointiin ja kohteen hienosäätöön.
Käytetystä kahdesta kokoonpanosta riippumatta yllä olevan menettelyn noudattamisen pitäisi minimoida halutun tuloksen saavuttamiseksi tarvittavien toistojen määrä. Oikeilla työkaluilla ja laitteilla sekä muutamalla yksinkertaisella vinkillä laserkohdistus voidaan yksinkertaistaa huomattavasti.
Julkaisun aika: 11.3.2024